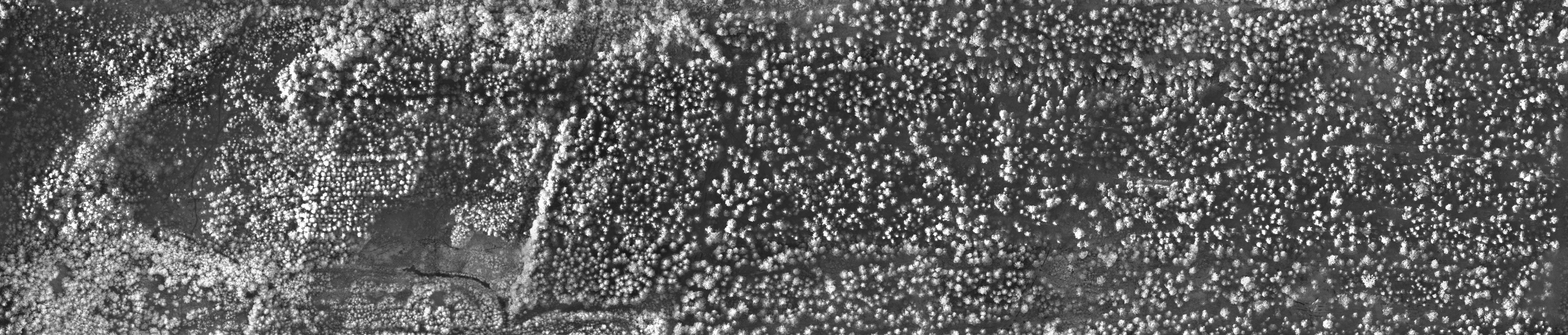
Two weeks ago, we did several flights with the lab’s new Parrot Sequoia multispectral camera. We have summarized how the camera can be mounted on a 3DR Solo drone. We also did a first quick 3D point cloud from the NIR photos:
The drone optimized multispectral camera, Parrot Sequoia, just arrived to the lab today! The camera collect images in four defined wavelength bands as well as a normal RGB sensor. More information about the camera.
In contrast to many other users, we plan to use the camera to capture data of forest. As soon as we have some footage to show, we will publish here on rslab.se.
The camera captures images (1.2 Mpx) in the following wavelength bands:
Green 550 nm (40 nm bandwidth)
Red 660 nm (40 nm bandwidth)
Red edge (10 nm bandwidth)
Near infrared (40 nm bandwidth)
In addition to the four narrow wavelength bands, the Sequoia has a RGB camera with 16 Mpx resolution.
3DR Solo, equipped with Flir Vue and GoPro over prescribed fire.
The scientists at the Ljungberg Lab at the Swedish University of agricultural Sciences in Umeå went for a two day field excursion to test thermal cameras and new drones. Joining the students at the Fire Management course at the Forest faculty, who were going to make a prescribed burning of a 20 ha clear-cut. We wanted to test our new Solo helicopter drone from 3Drobotics and to capture thermal video and images from our Flir Vue camera. We also wanted to test the thermal camera in our fixed wing Smartplane drone.
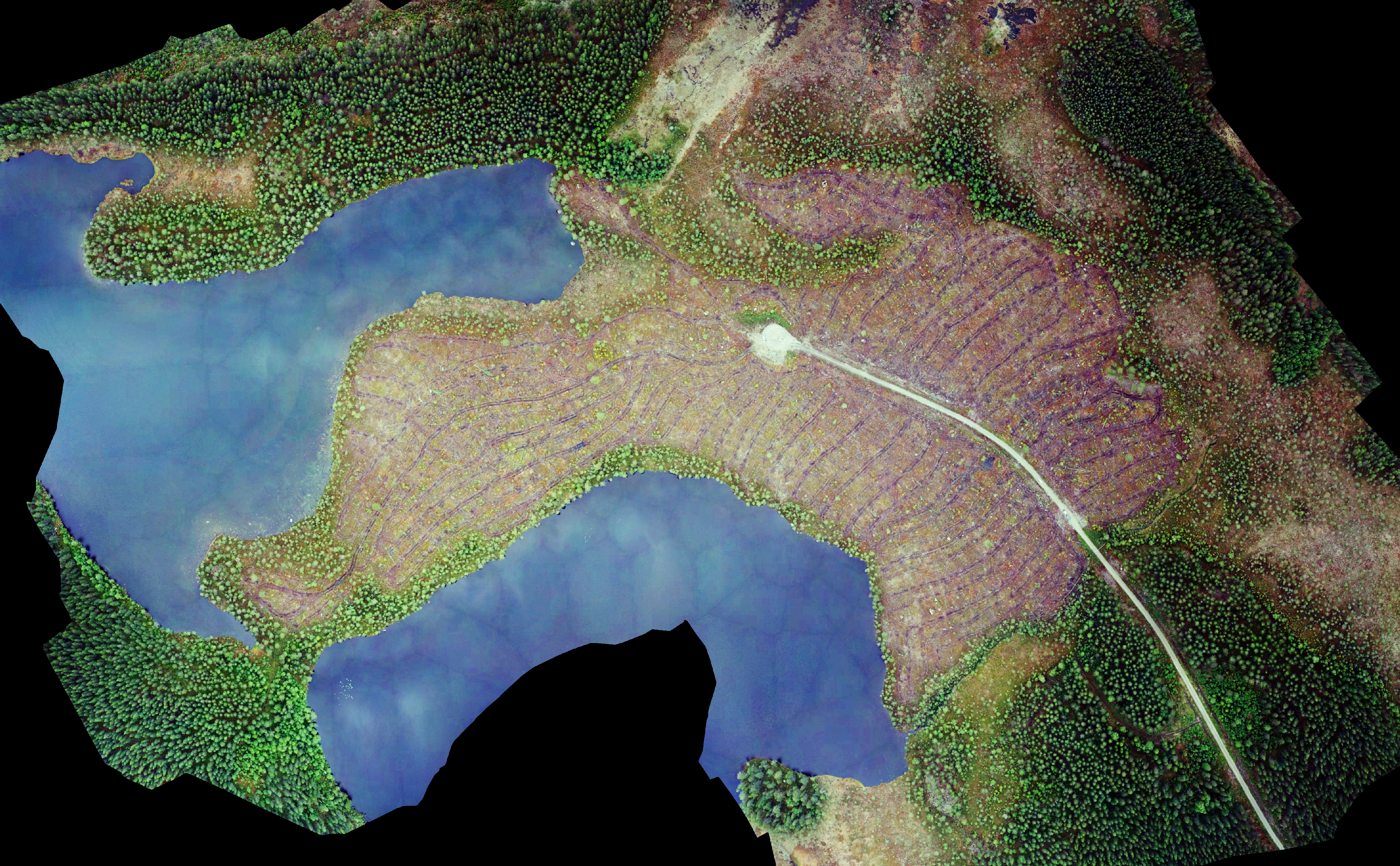
We started by capturing RGB images from 200 meters above ground with the Smartplane before the fire was started. From this imagery we created a 7 cm Ground Sampling Distance (GSD) orthorectified image mosaic. Which could be used for describing the pre-fire state of the area.
Pre-fire orthophoto original wirh 7 cm resolution made from Smartplanes mapping system
3DR Solo with GoPro and Flir Vue Pro, the cameras are tilted forward to acquire oblique video.
The video streams were later synchronized and fused to a side-by-side video using a software made by engineering students (an earlier project at the Ljungberg Lab).
Forest fire, fusion of thermal and RGB camera
Forest fire, thermal and RGB camera side-by-side
Under the duration of the controlled burning we flew the thermal camera multiple times, with the purpose of acquiring aerial thermal and visual (RGB) images to describe the burn process and to test the usefulness of having a thermal camera to find hotspots or ground fire hours after the fire front have passed an area.
3DR Solo ready to photograph controlled burning with thermal (Flir Vue) and visual (GoPro) cameras.Smartplane ready to be launched for thermal mapping.
This will be evaluated later, when all data sets had been processed to orthorectified imagery and also to 3D point clouds.
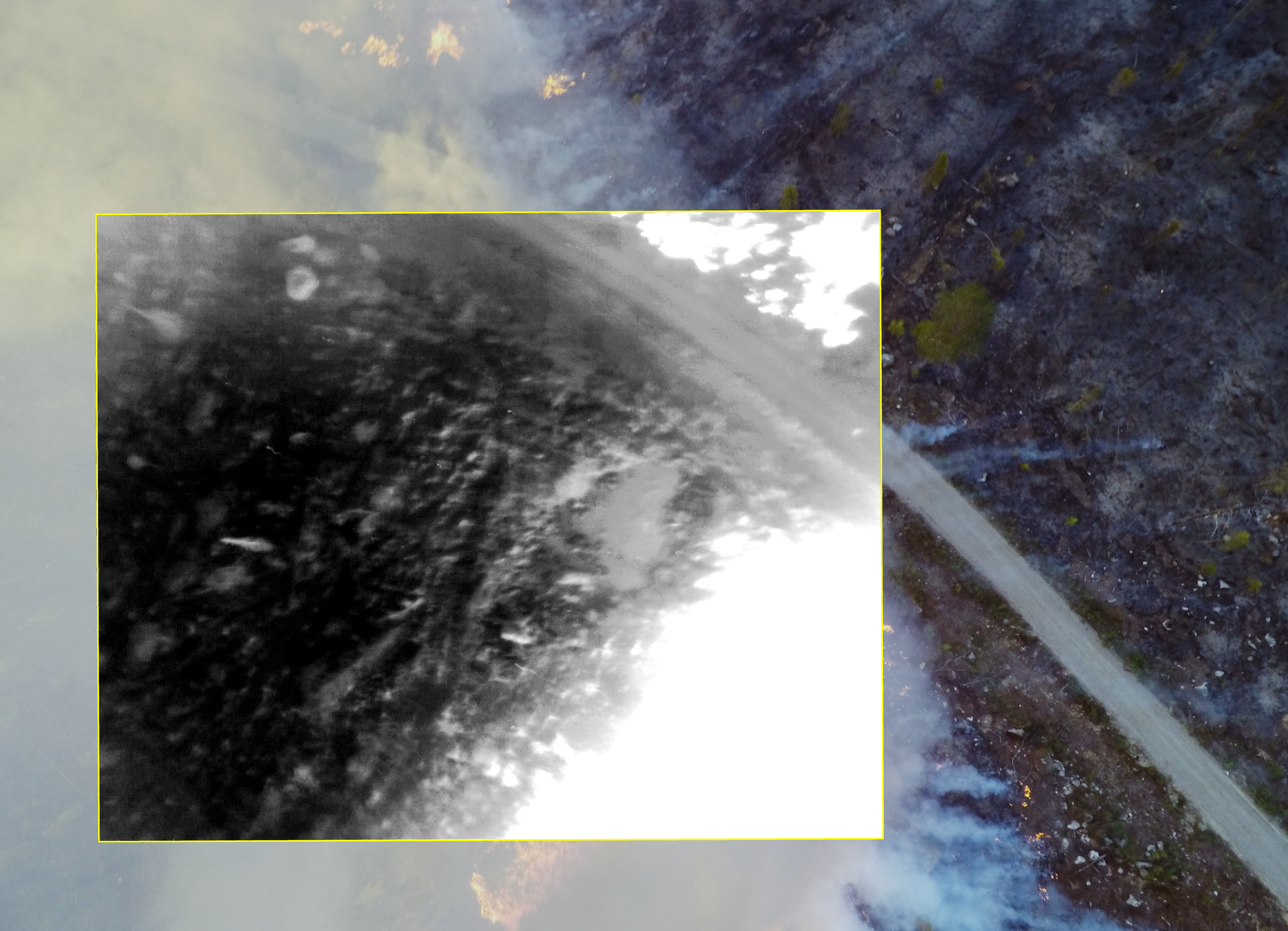
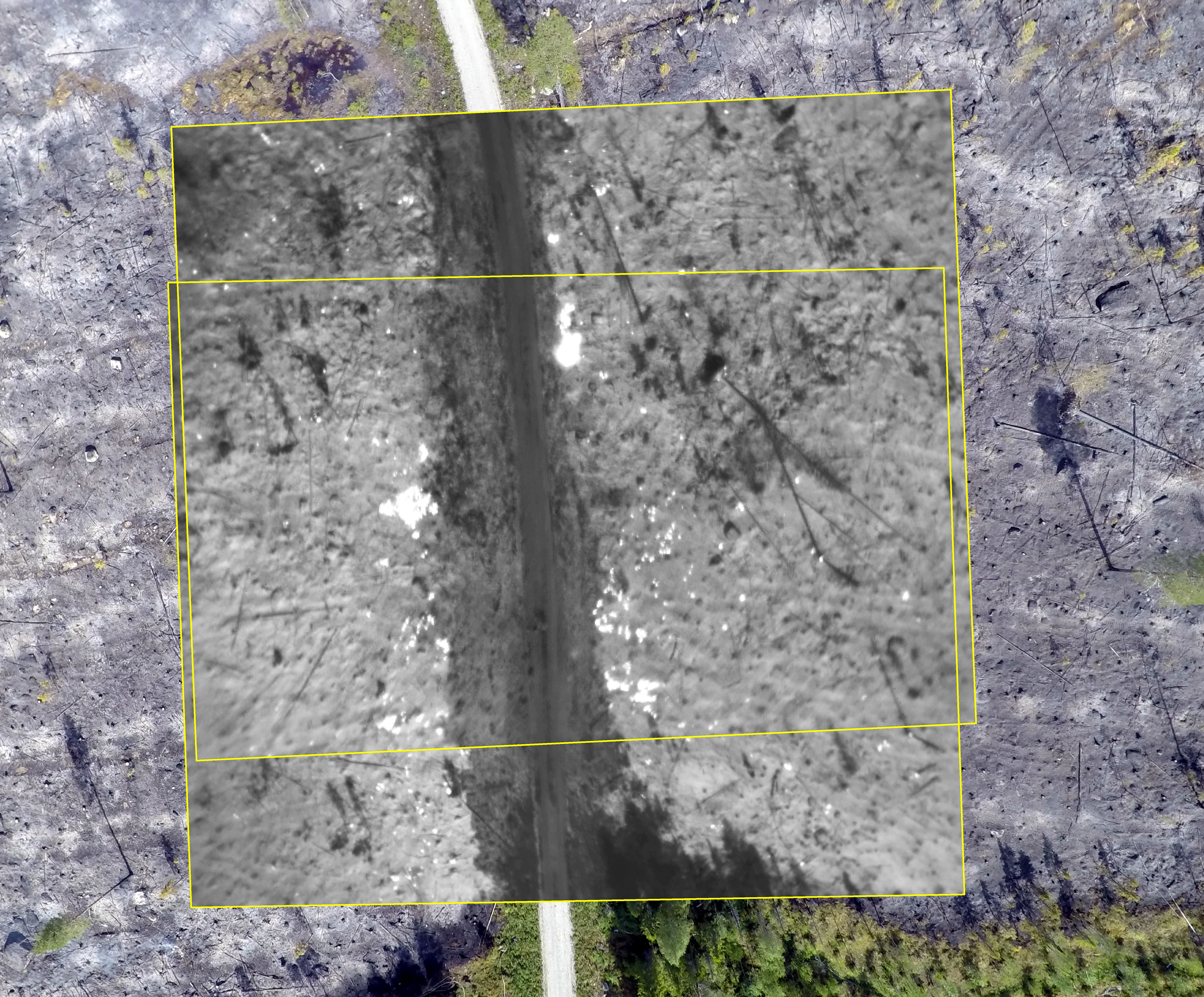
An image taken with a GoPro camera from 80 meters altitude. The yellow border shows the extent of the thermal camera. Note the person walking on the road.Same as above, but a thermal image overlaid. White color is warm and black is cold. Note the hot area on the right side of the road which only can be seen in the thermal image.An image taken with a GoPro camera from 80 meters altitude. The yellow border shows the extent of two thermal images. These images were taken about 12 hours after the fire front had passed the area.Same as above, but two thermal image overlaid. White color is warm and black is cold. Note the hot spots on both side on the road only seen in the thermal images.Sunset through the smoke.
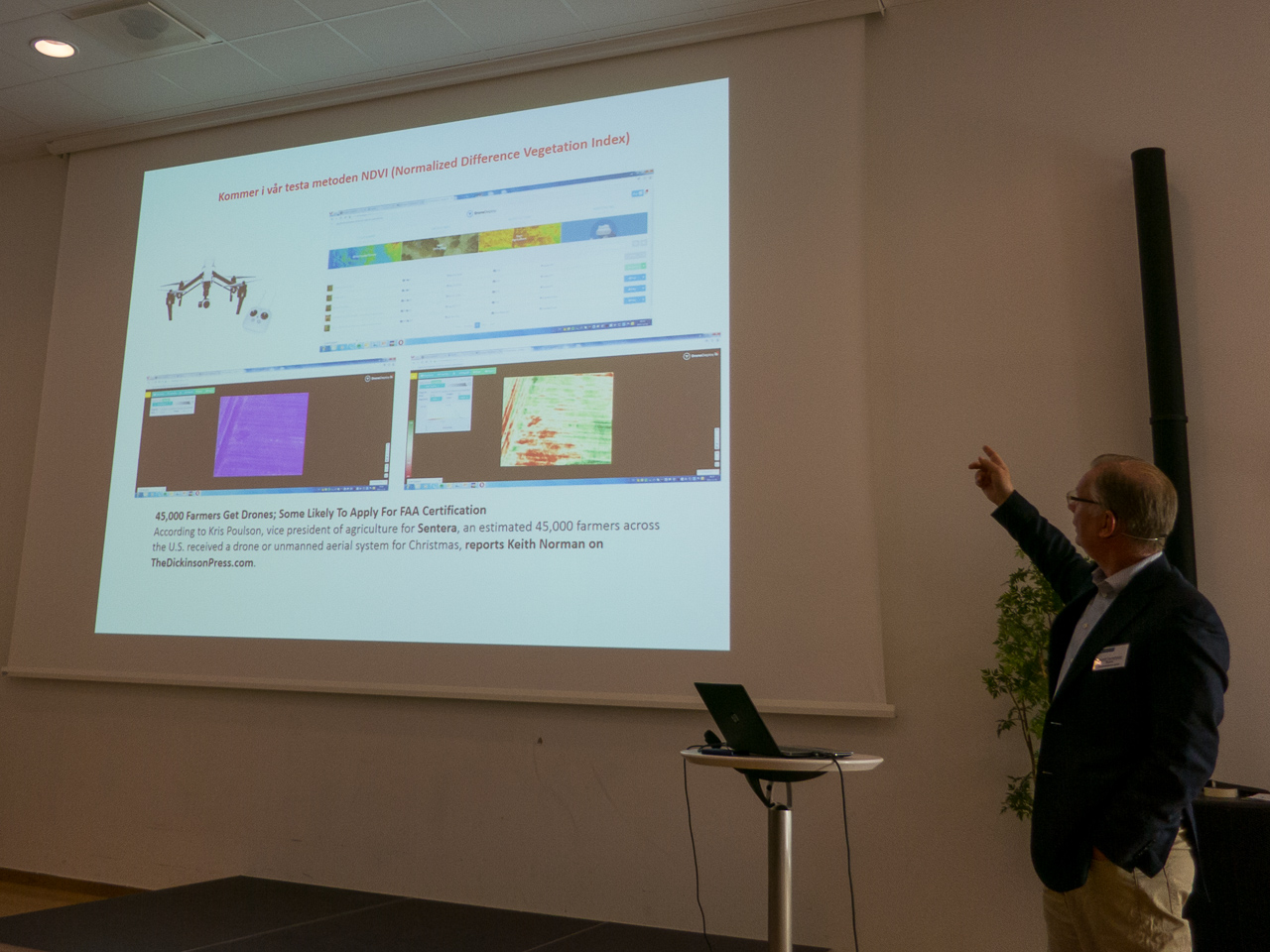
Mattias visited the UASForum Conference in Linköping, Sweden, on Tuesday and Wednesday (24-25 May). Mattias presented how drones can be used in forestry as well as how the SLU in Umeå have implemented drones in the education.
Mattias presented “Drones for smart forestry”. Photo: UASForumSweden.seNilsson Drones.CybAero, a large drone with a total weight up to 200 kg.Leica’s hexacopter.Rudolf owns a big farm and uses drones in many applications.SenseFly’s quadcopter.
On Thursday (21st April), Heather Reese, Head of Remote sensing division at SLU in Umeå, will give a seminar about “Removing the topographic effect from satellite data with the new 2m DEM”. It is scheduled to 14:30 in Ljungbergslaboratoriet (1st floor in the SLU building).
Adrian Straker will tomorrow, Friday, present his master thesis “Comparison of forest fire severity classification models based on aerial images and Landsat 8 OLI/TIRS images of a forest fire area in central Sweden”.
Room: Årsringen, next to the Ljungberg lab
Time: Friday 8th April, 9.00 am
Welcome!
Next week, Edward and André will present their thesis.
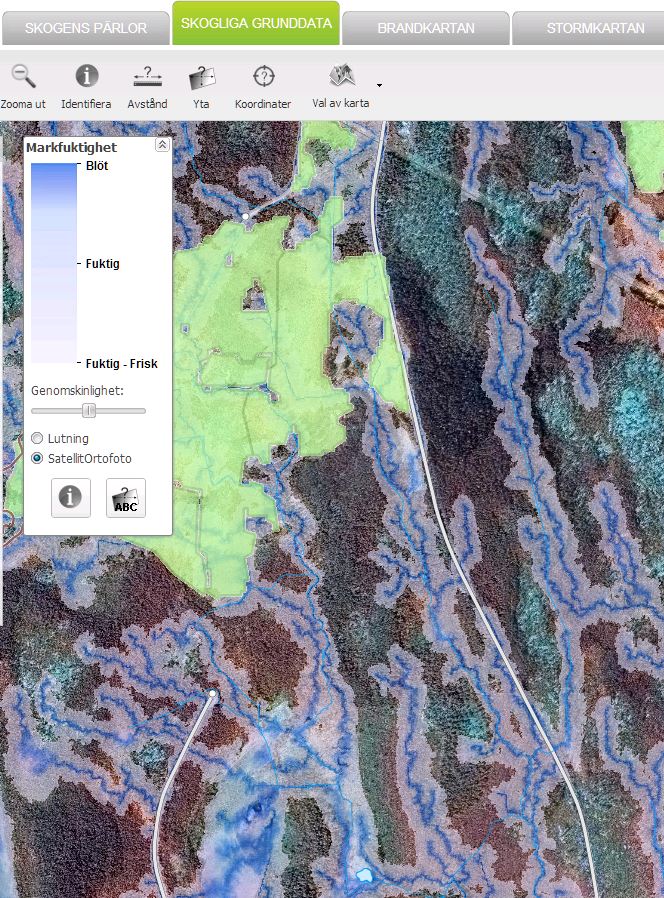
At the Ljungberg laboratory, we have started a project where we combine the traditional dowsing rod with latest drone technology. The goal is to improve the existing and important Depth to Water Map available online. At the Ljungberg lab, a teaching lab for advanced 3D remote sensing, we always aim to make a wide range of sensors available for our students – this project is a bold step in that direction.
[Swedish] I Ljungberglaboratoriet har vi startat ett projekt där vi kombinerar den traditionella och länge använda slagrutan med senaste drönar-teknik. Målet är att förbättra den befintliga och viktiga fuktighetskartan som finns på nätet. I Ljungberglabbet, ett undervisninglaboratorium för avancerad 3D fjärranalys, strävar vi alltid efter att ha ett stort antal sensorer tillgängliga för våra studenter och det här projektet är i linje med detta.
Edit 2016-04-04:
You probably understood that this was not a real project due to the publication date (April 1st)… but please contact us if you have ideas for possible use of drones and collaboration suggestions.
[Swedish] Förhoppningsvis förstod alla att detta inte var ett riktigt projekt då det publicerades 1 april… men vi tar gärna emot nya idéer på drönaranvändning och möjliga samarbeten.
The lab’s hexacopter equipped with the dowsing rod.
Collecting dowsing rod data from the forest area close to the university.The existing Depth to Water Map at Skogsstyrelsen. The goal of this project is to improve the map by using the traditional dowsing rod in combination with the latest drone technology.
The title might not tell you much about what this seminar is about… However, if you come to Ljungbergslaboratoriet on Thursday 17th March 14:30, Sebastian Schnell will tell you more about his work in the Advanced SAR-project.