Two weeks ago, we did several flights with the lab’s new Parrot Sequoia multispectral camera. We have summarized how the camera can be mounted on a 3DR Solo drone. We also did a first quick 3D point cloud from the NIR photos:
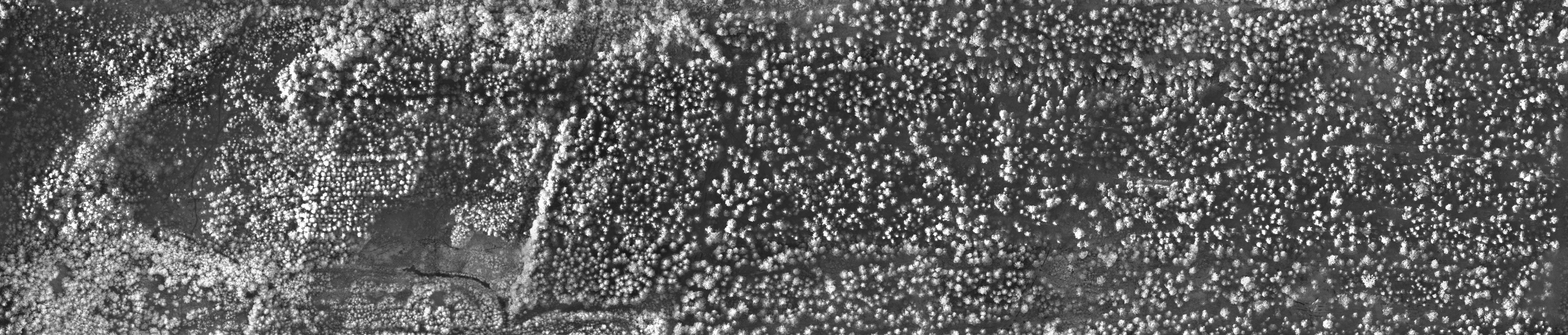
The ortofoto in NIR-band looks like this: