The lab also offers several softwares for analysis of the 3D-data. More information about the softwares available in the lab.
The lab also offers several softwares for analysis of the 3D-data. More information about the softwares available in the lab.
The lab has a Flir Vue Pro 13mm thermal camera with 640×480 pixels resolution and 30 frames per second. The camera can be used to locate hot-spots when putting out a forest fire.
Here is an example of a flight in a prescribed fire in Ekträsk.

Example of a synchronized video feed from a GoPro and the thermal camera:
Forest fire, fusion of thermal and RGB camera
The lab have two high resolution GNSS receivers. The newest is a Trimble GeoXR 6000 from 2014 and the second is a TopCon GRS-1 from 2010. Both uses RTK (Real Time Kinematic) and connects to Swepos using either Telia cellular network or through a WLAN connection with a Net1-modem. Both these devices can measure a point in a few seconds with centimeter resolution, but it needs clear vision to the satellites.
Here are user instructions for the devices:

In the lab we have in total 8 computers specially designed to work with heavy processing of 3D-data. One of the computers is connected to a 75 inch UHD-TV and is used for presentations and the HTC Vive (Virtual Reality). One of the computers is stored in a server room and used as a processing machine.
The computers are numbered from their computer names:

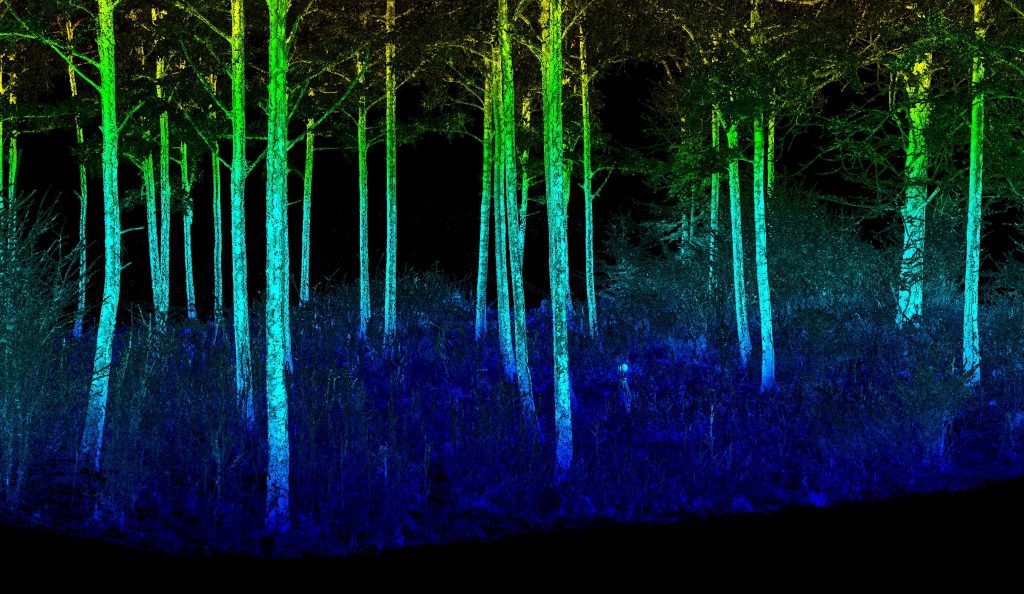
The lab has a Trimble TX8 laser scanner (from 2014). The scanner is used to collect accurate measurements of the ground and the tree stems. Here is an example of one birch that is cut out from a multiscan (several scans are merged into one dataset):

The scanner is mounted on a tripod and collects 1 million points every second. In three minutes a full scan is done with a point spacing of about 4 mm on 10 meters distance.

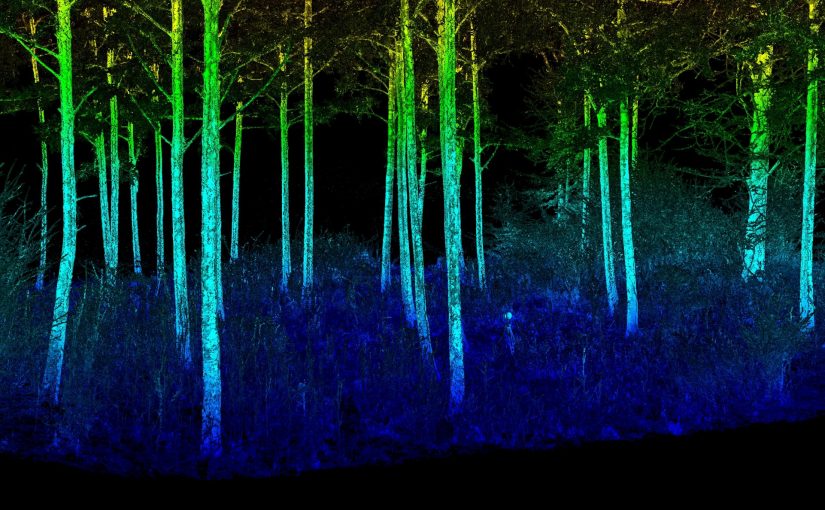
Fly through video of a plot in Remningstorp. 16 scan locations merged. Intensity and height above ground are merged in the coloring of the 3D-points.
Fly through of another plot. Coloring of the 3D-points are from the intensity of each return.
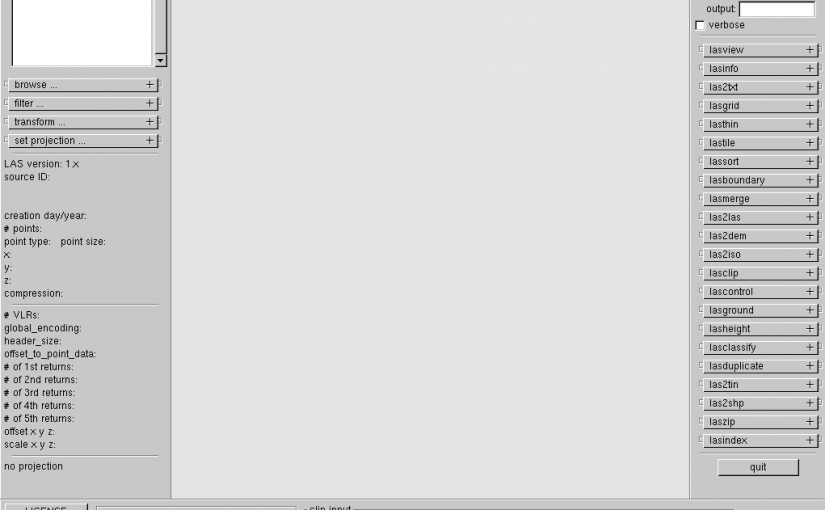
We have a research and education license for the LASTools software. It is installed in all the lab’s computers. Please contact the lab’s responsible if the license is experied or the program is missing. The tools are frequently updated so if you need the tools for your work, make sure you have the most recent version, please contact us if you notice that there is an old version installed (c:\lastools).
The latest version of LASTools can be downloaded from here. Read more about LASTools on RapidLasso GmbH.
Here is a summary of the tools available and also a few links where you can read more about the software and a active forum.
These tools does not require a license.
These tools requires the licence that we have installed in the lab’s computers.
BLAST extension (use if you have huge amount of points):
The lab has several drones designed for different loads and purposes. Here is a list of the models we have:
We also have equipment to be used with the drones, for example:
Here are some of the drones in a field test:

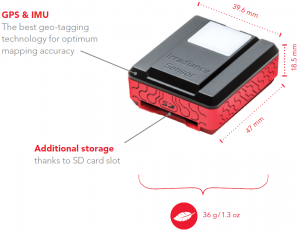
Parrot Sequoia is a small and light weight (72 g) multispectral camera made for drones. The camera has a synchronus global shutter with four spectral bands:

The camera also has an irradiance sensor (36 g) that can be mounted on top of the drone to measure the ambient light. The sensor also includes a GPS and IMU module and a SD-card slot.
We have mostly used the camera mounted on our 3DR Solo drone (mounting instruction).

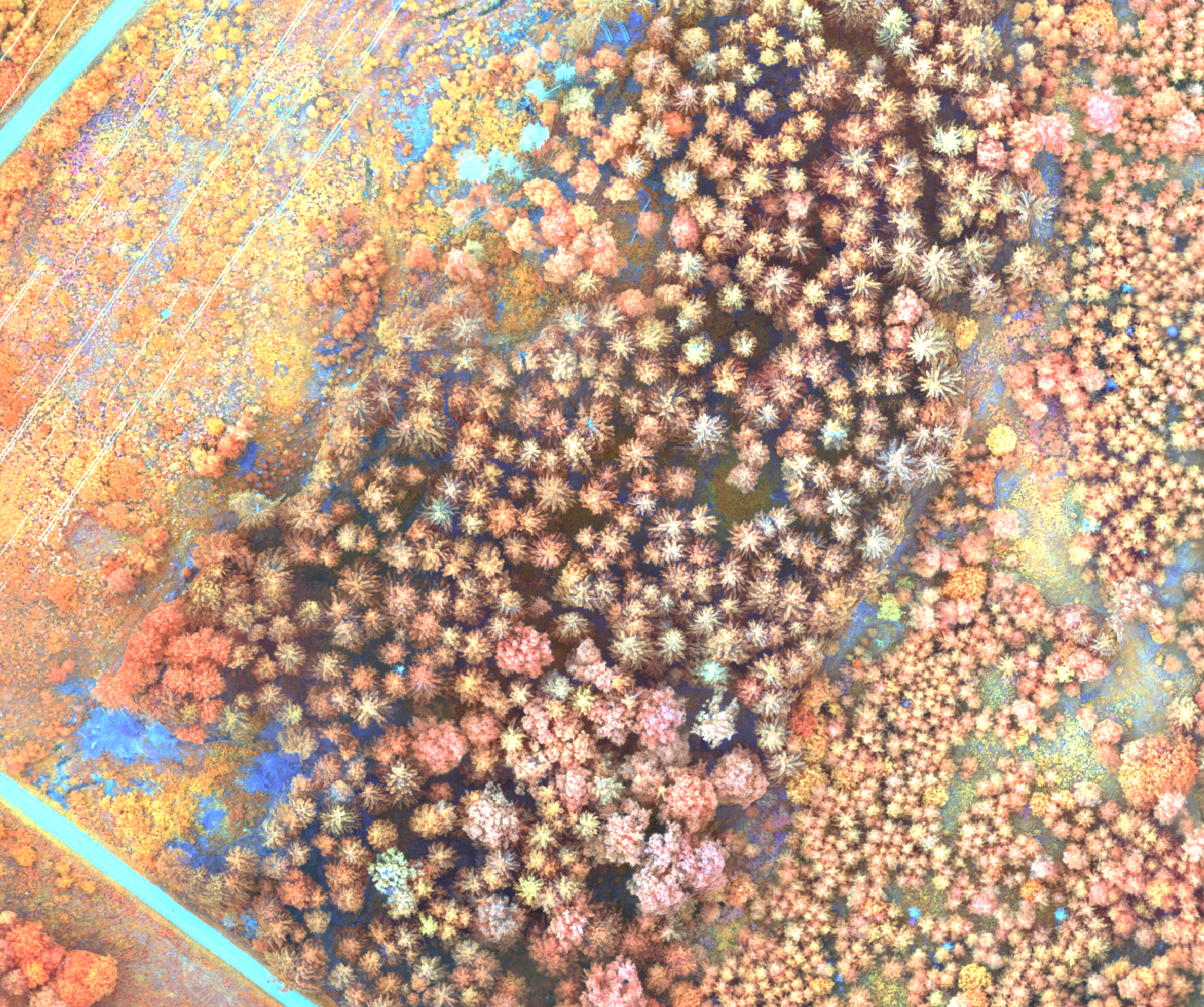
Here is an example of an ortophoto over a forested area close to a road and power-line in Remningstorp:
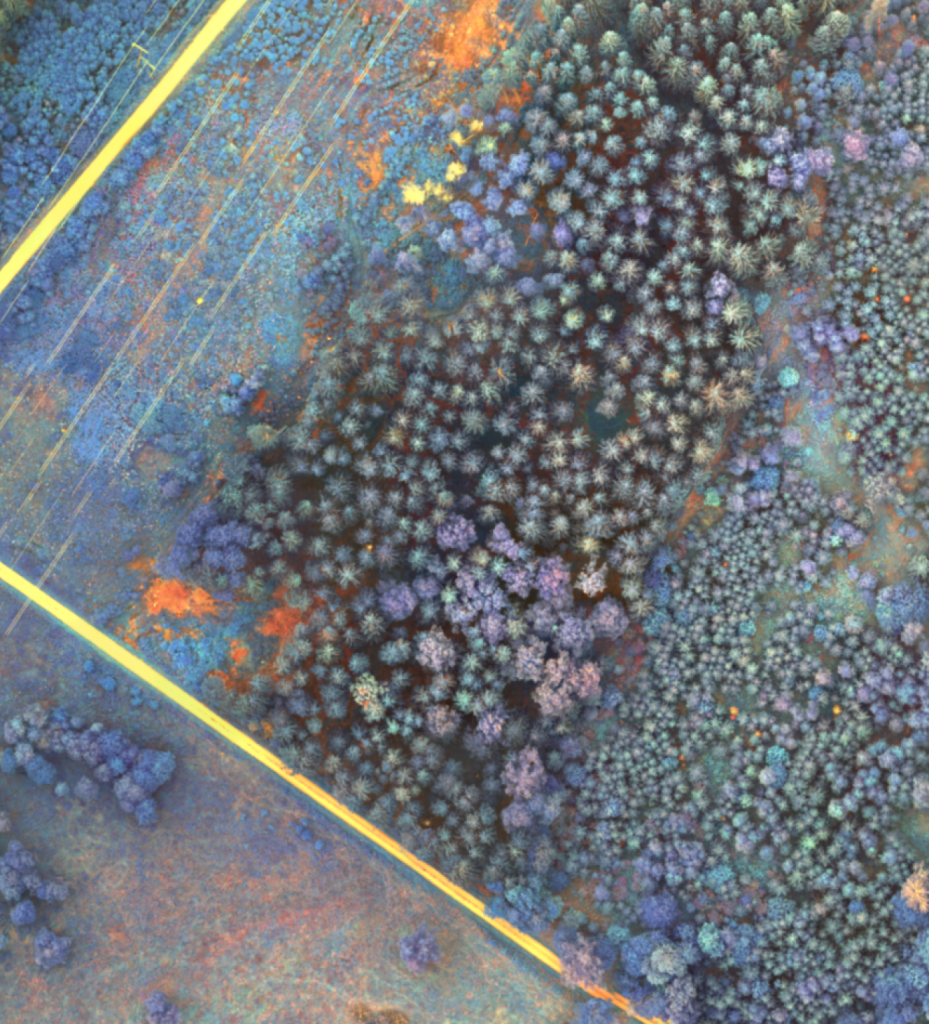
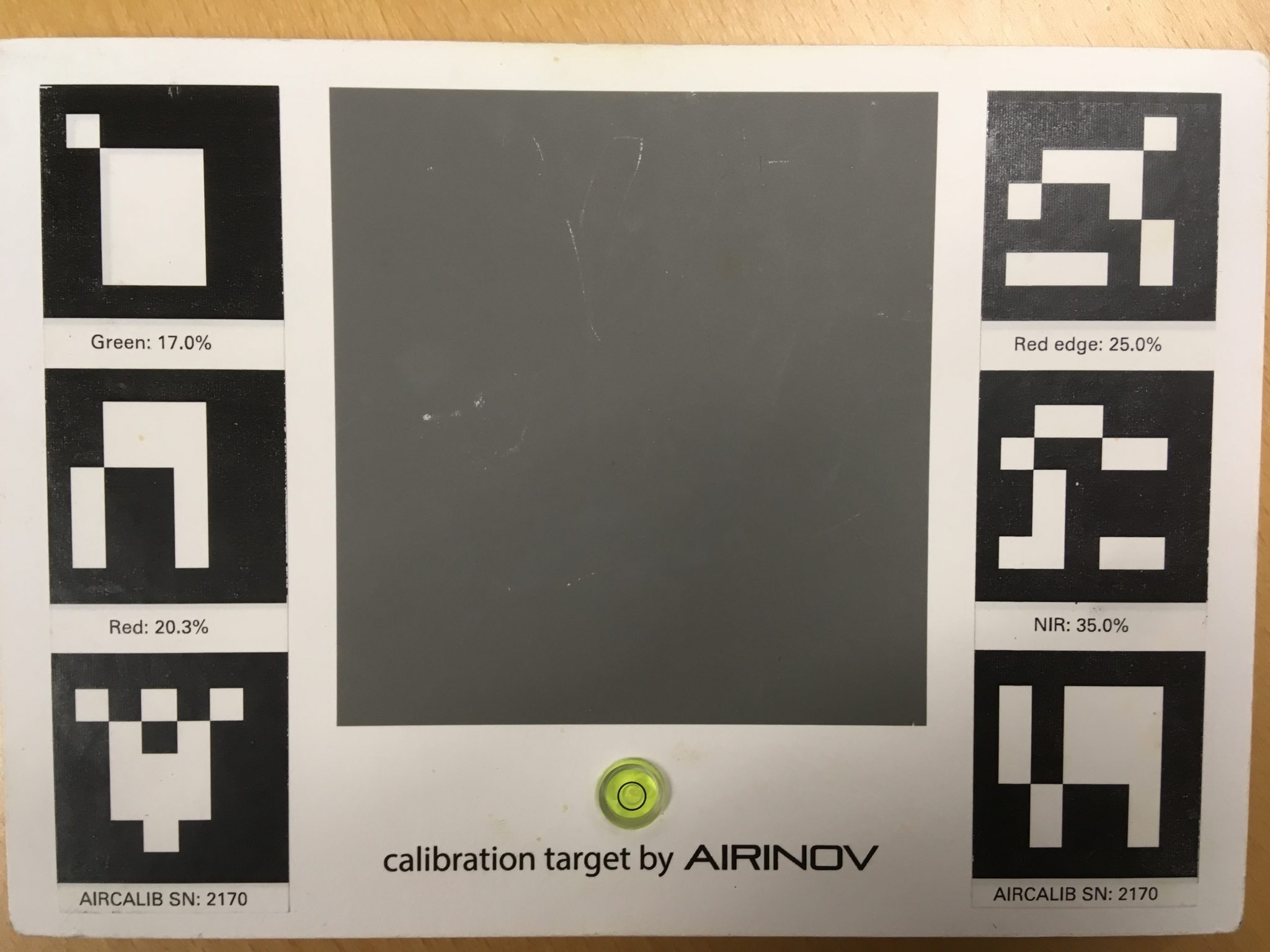
The spectral calibration plate for the lab looks like this. Use the information about the reflectance when postprocessing in for example Agisoft Metashape Pro or Pix4D.
Sample plots with 40 m radius were scanned with the Trimble TX8. Each sample plot was covered with 16 scan locations. In total 40 sample plots were scanned. The work was conducted from September to December 2014. Example of the data:
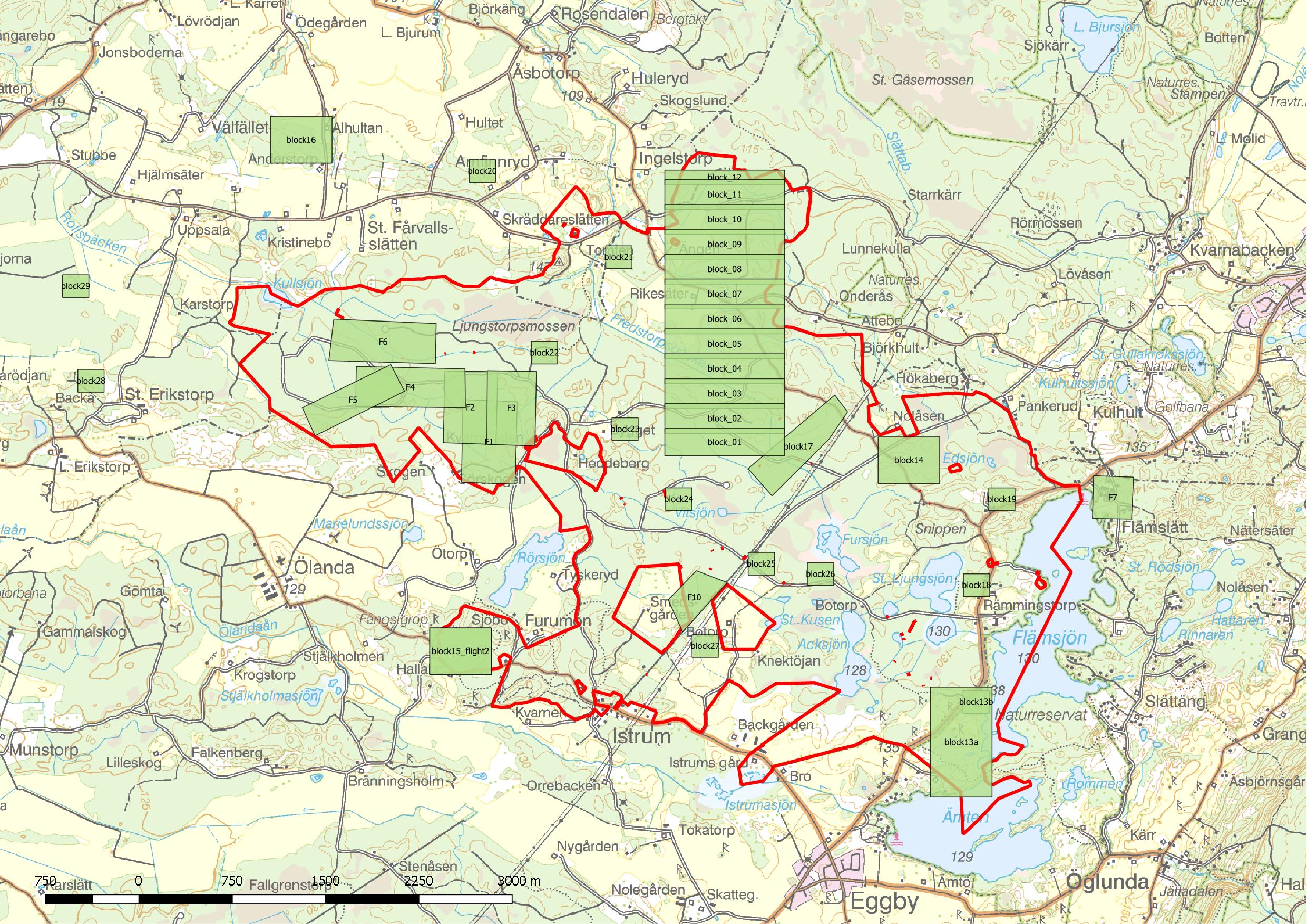
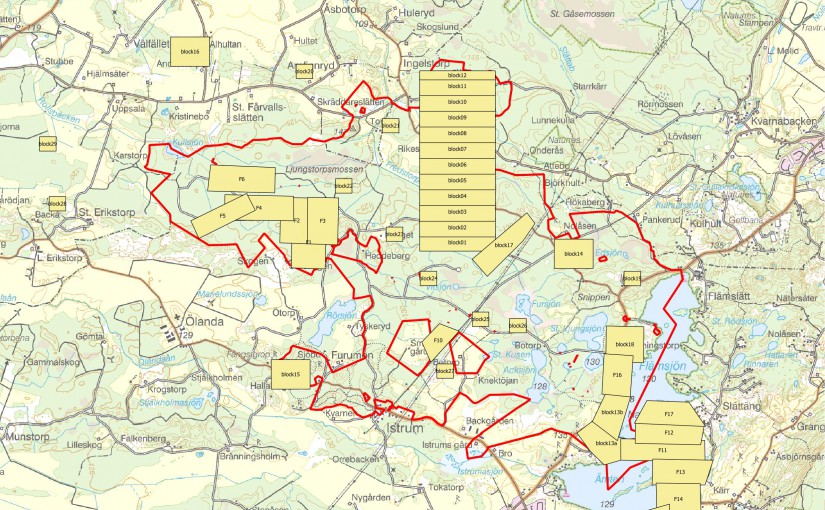
In August 2016 we collected drone images over the forest estate Remningstorp. This data collection was funded by “Stiftelsen för skogsvetenskaplig forskning” at the Swedish University of Agricultural Sciences. Below you find an overview of the flown areas. If you are interested to use one of the flight blocks, please contact Mattias Nyström. This data is free to use, but we might charge you a delivery cost depending on the amount of data.
We have made block25 available for direct download. This block was automatically post-processed using Agisoft Photoscan. The data is in SWEREF99TM RH2000, but is not georeferenced using ground control points. There has neither been any manual work done after the automatic batch processing. If you want to use the data for more than viewing and understanding, please contact us to receive the original photos and you may process the data yourself.
The following blocks were flown with the Parrot Sequoia multispectral camera:
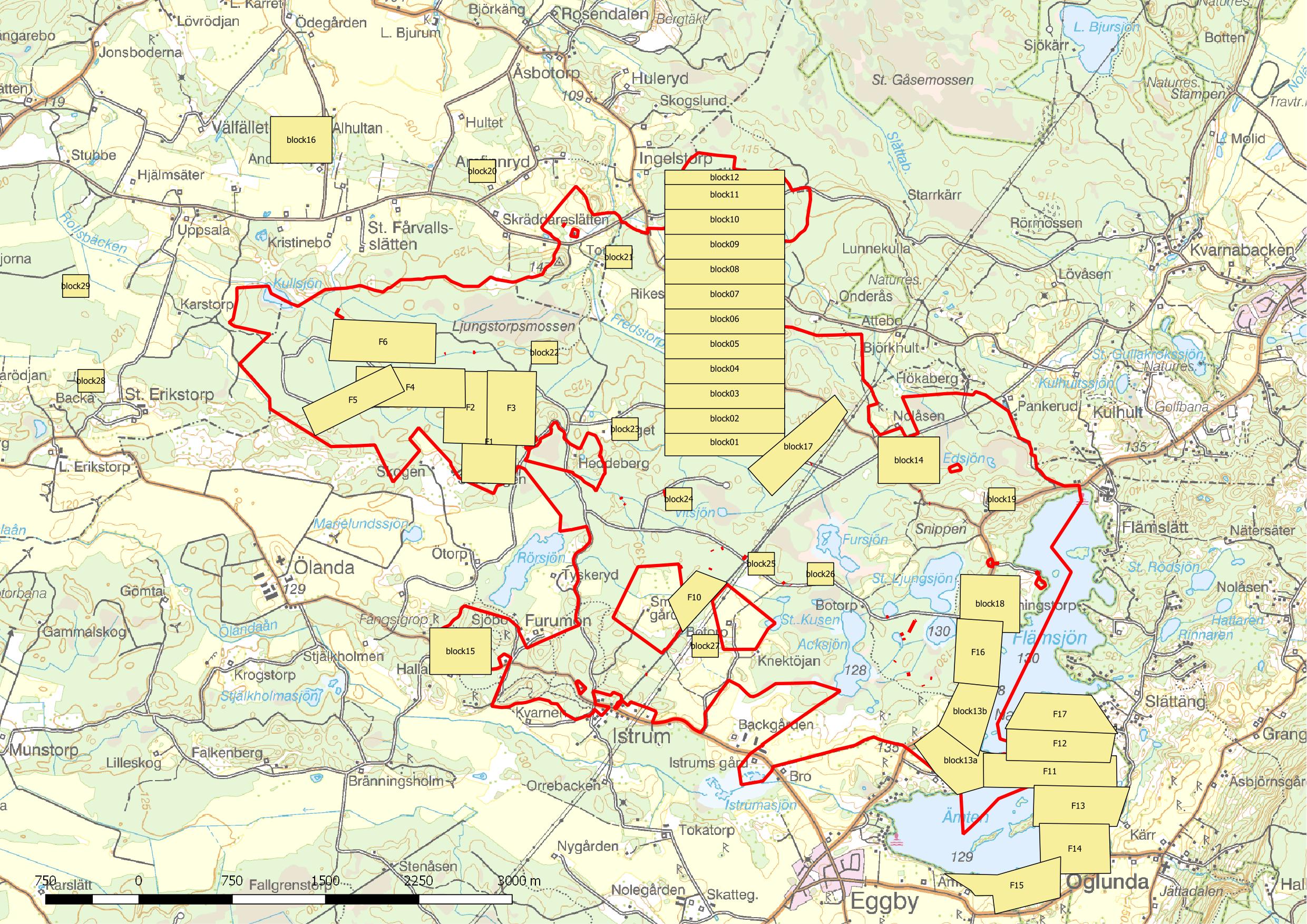
The following blocks were flown with the Sonya a5100 with a 20mm lens: