

The scientists at the Ljungberg Lab at the Swedish University of agricultural Sciences in Umeå went for a two day field excursion to test thermal cameras and new drones. Joining the students at the Fire Management course at the Forest faculty, who were going to make a prescribed burning of a 20 ha clear-cut. We wanted to test our new Solo helicopter drone from 3Drobotics and to capture thermal video and images from our Flir Vue camera. We also wanted to test the thermal camera in our fixed wing Smartplane drone.
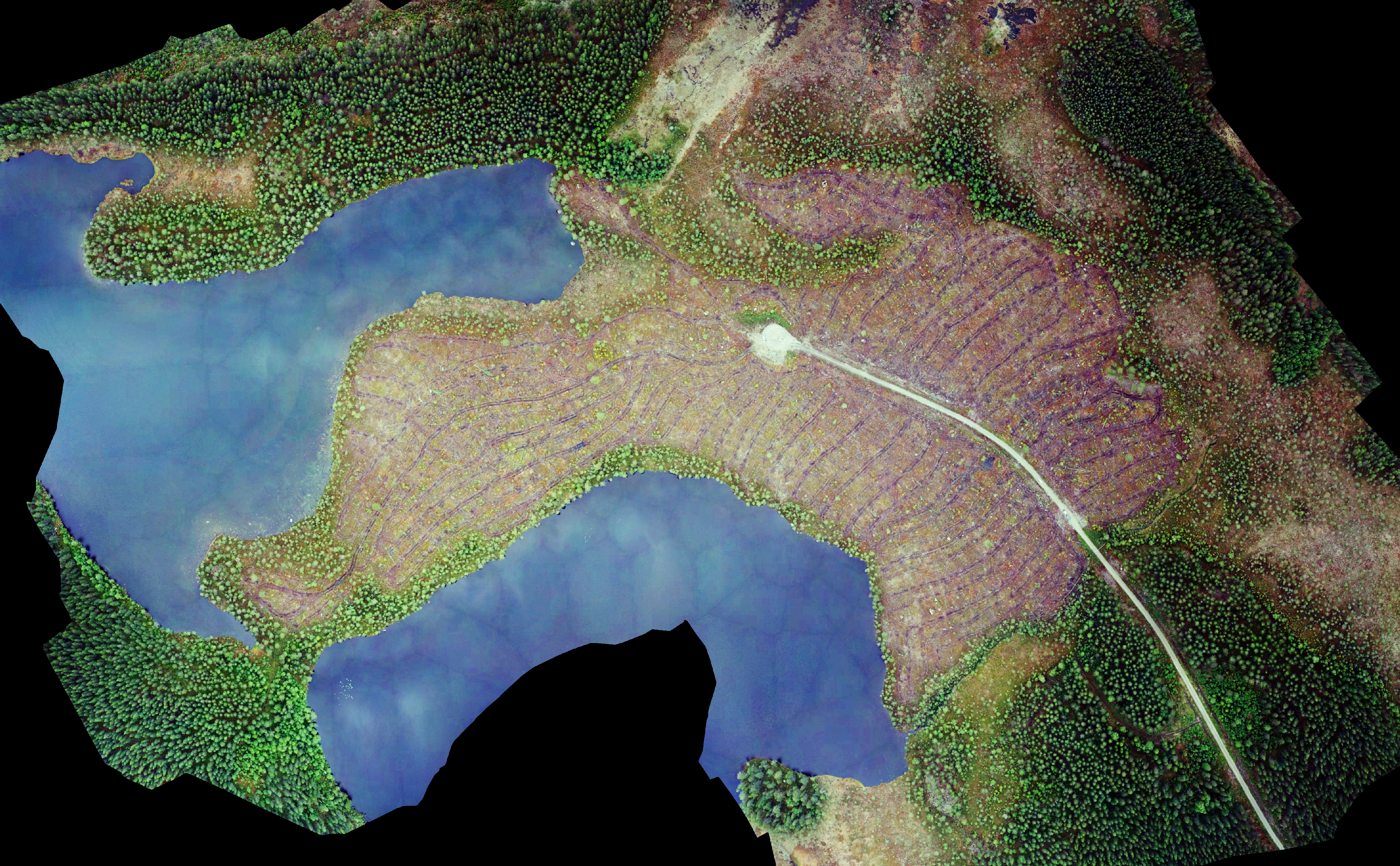
We started by capturing RGB images from 200 meters above ground with the Smartplane before the fire was started. From this imagery we created a 7 cm Ground Sampling Distance (GSD) orthorectified image mosaic. Which could be used for describing the pre-fire state of the area.
We started by capturing video with both visual (GoPro, with modified lens) and thermal video (Flir Vue Pro 13mm 640×480) of the controlled burning (prescribed) of the clear-cut.

The video streams were later synchronized and fused to a side-by-side video using a software made by engineering students (an earlier project at the Ljungberg Lab).
Forest fire, fusion of thermal and RGB camera
Forest fire, thermal and RGB camera side-by-side
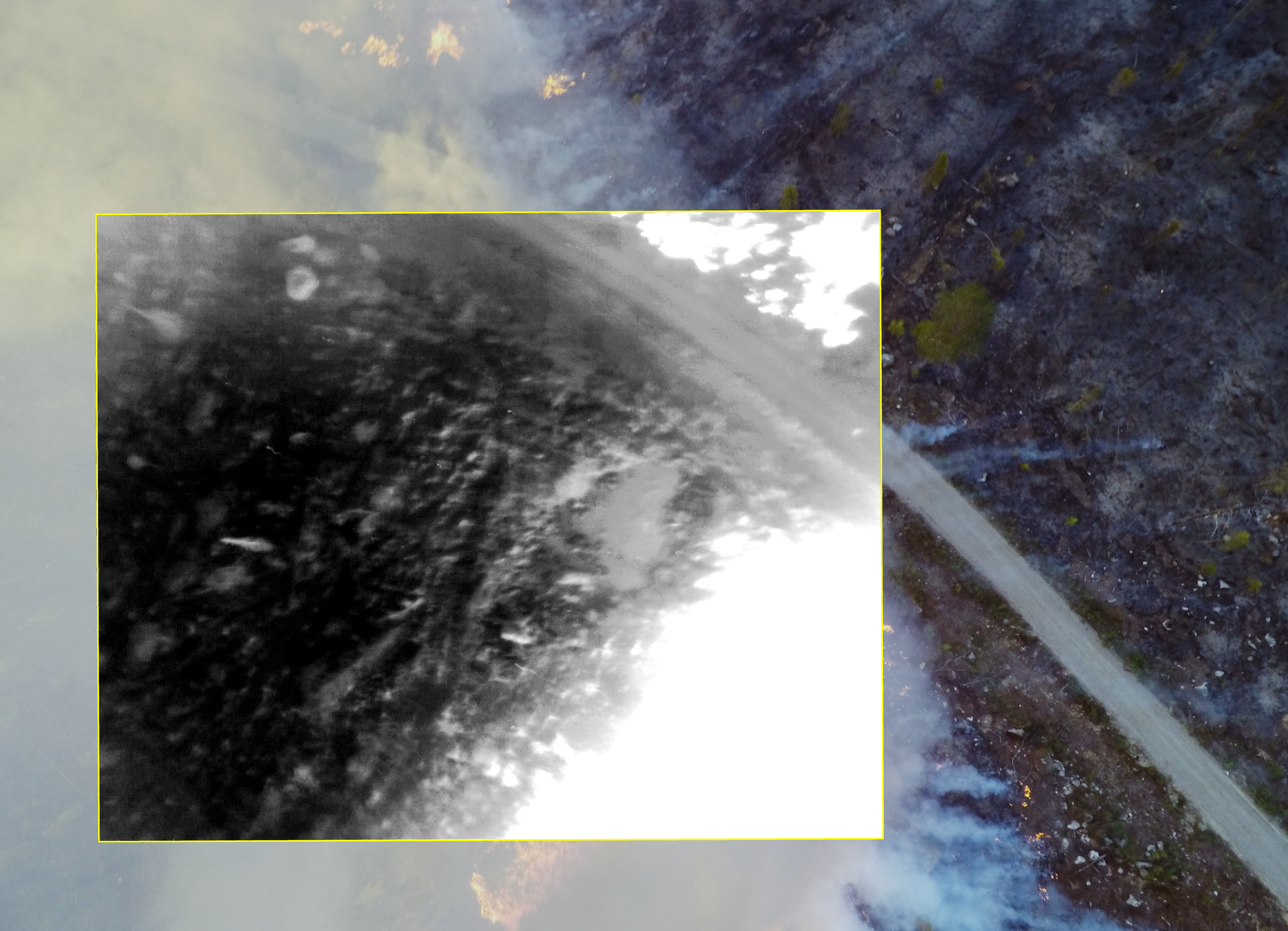
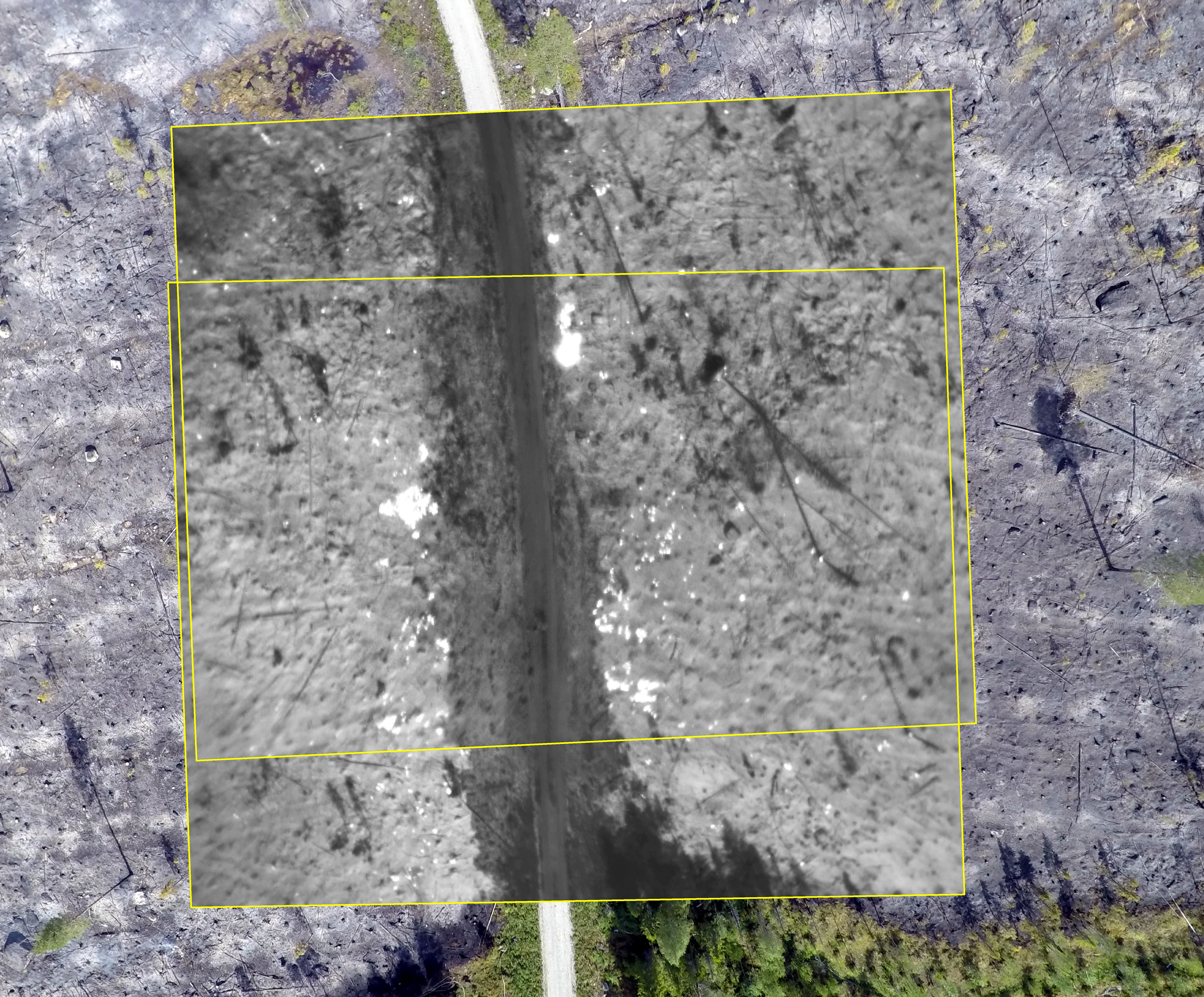
Under the duration of the controlled burning we flew the thermal camera multiple times, with the purpose of acquiring aerial thermal and visual (RGB) images to describe the burn process and to test the usefulness of having a thermal camera to find hotspots or ground fire hours after the fire front have passed an area.


This will be evaluated later, when all data sets had been processed to orthorectified imagery and also to 3D point clouds.



Jonas Bohlin and Mattias Nyström